
Die Entwicklung eines Fahrzeugs startet mit dem Erkennen eines Bedürfnisses, einer Idee oder der Erkenntnis ein bestehendes Problem zu lösen. Technologisch spielt sich ein großer Teil der Entwicklung am Computer ab. Entwürfe werden erstellt, zusammengeführt und im virtuellen Fahrversuch überprüft. Erst nach erfolgreichen Simulationsläufen erfolgt der Fahrdynamikversuch unter realen Testbedingungen. Dabei werden Fahrzeuge unter den verschiedensten Bedingungen weltweit erprobt und getestet, um so jede noch so erdenkliche Schwachstelle vor dem Beginn der Serienproduktion zu erkennen und zu lösen.
Die Entwicklungszyklen werden dabei immer kürzer, bei gleichzeitig steigender Anzahl von durchzuführenden Absicherungstests. Der Versuchsingenieur muss sich auf die Messtechnik verlassen können. Hochwertiges Equipment, automatisierte Tests und Testabläufe unterstützen den Versuchsingenieur und vermeiden Fehlmessungen. Dadurch erhöht sich die Qualität und Effizienz der Erprobung.
Im Bereich der Fahrdynamik müssen zeitgleich eine Vielzahl von Messgrößen mit höchster Präzision und Genauigkeit erfasst werden. Aufwändige Montagen von Sensortechnik und Ausrichtung des Equipments kosten Zeit und reduzieren oftmals die effektive Nutzungsdauer der Teststrecke.
An diesen Punkten setzt die Entwicklung von Sensoric Solutions an:
Der optische Sensor OMS 7 unterstützt den Versuchsingenieur für die fahrdynamische Untersuchung eines Fahrzeugs in vielfältiger Weise. Der Sensor erfasst nahezu alle nötigen, fahrdynamisch relevanten Messgrößen, dazu zählen die Fahrgeschwindigkeiten in längs und quer Richtung, sowie die Beschleunigungen und Drehraten in alle drei Raumrichtungen mit einer unvergleichlichen Genauigkeit. Der OMS 7 erfasst seine Messgrößen der beiden Fahrgeschwindigkeiten in längs und quer Richtung durch eine direkte, berührungslose Messung. Fehlerbehaftete Integrationen entfallen aufgrund des direkt messenden optischen Arbeitsprinzips. So werden beispielsweise die Fahrgeschwindigkeit und der Schwimmwinkel direkt mit einer hohen Genauigkeit von bis zu 0.1 % gemessen. Integrations- und Offset Fehler sind ausgeschlossen.
Erklärung des optischen Verfahrens:
Eine infrarote LED-Beleuchtung strahlt auf die Fahrbahn. Die Reflexion der strukturierten Oberfläche der Fahrbahn wird über ein Linsensystem auf einem gitterförmigen Fotodiodenarray abgebildet. Ein Umlenkspiegel erlaubt die Umlenkung des einfallenden Lichts und ermöglicht so eine kompakte Bauweise.
Erfolgt eine Bewegung des Sensors oberhalb der Fahrbahn, so durchlaufen die einzelnen Strukturpunkte des Untergrundes die einzelnen Dioden Flächen. Bei jedem Überlauf eines Strukturpunktes über die Dioden Fläche, wird eine elektrische Spannung erzeugt.
Das hieraus entstehende Signal ähnelt einem amplitudenmodulierten Sinus Signal. Die Amplitude des Signals hängt von der Reflektion des Untergrundes ab und unterliegt starken Schwankungen. Eine Nutzung zur Bestimmung der Kenngrößen ist nicht möglich. Die Frequenz des Signals ist jedoch proportional zur gefahrenen Geschwindigkeit.
Um die Quergeschwindigkeit messen zu können, wird das Fotodiodenarray mit weiteren Dioden ausgeführt. Die Dioden Flächen stehen im 90° Winkel zueinander und in 45° Grad Winkel zur Fahrtrichtung.
Bei geradeausfahrt, sind die Frequenzen der beiden Fotodiodenhälften gleich groß. Bewegt sich das Auto auf einer Kreisbahn, durchlaufen die Strukturpunkte des Untergrundes die einzelnen Dioden Flächen unter einem Winkel. Dies führt dazu, dass eine der beiden Frequenzen kleiner und die andere größer wird. Aus dem Verhältnis der beiden Frequenzen kann nun mittels trigonometrischer Formeln der Geschwindigkeitsvektor bestimmt werden. Eine Umrechnung erlaubt die Bestimmung der Längs- und Quergeschwindigkeit.
Zu den Eigenschaften zählen:
- Berührungsloses, schlupffreies Messprinzip
- Messbetrieb auf nahezu allen Oberflächen möglich
- Etablierte und anerkannte Technologie
- Begrenzte Auflösung des Weges
Was ist eine IMU?
Die im Sensor eingesetzte IMU (inertiale Messeinheit; englisch: inertial measurement unit, IMU) ist ein komplettes Inertialsystem bestehend aus einem Drei-Achsen-Gyroskop und einen Drei-Achsen-Beschleunigungsmesser. Die Drei-Achsen Ausführung erlaubt die vektorielle Bestimmung von Drehrate und Beschleunigung im Raum. Bei dem eingesetzten Typ handelt es sich um eine MEMS basierte IMU. Hierbei werden miniaturisierte mechanische und elektrische Komponenten auf einem Mikrochip kombiniert. Die Baugröße beträgt je nach verwendetem Chip nur wenige Millimeter und findet so neben der Optik im Sensor Platz.
Eigenschaften der IMU:
- Hochdynamisches System
- Hohe Bandbreite
- Hohe Ausgaberaten
- Signale unterliegen einer Drift bzw. Offset
Die Fusion beider Technologien
Die Fusion von den Signalen aus der Optik mit den Daten der IMU birgt einen hohen Mehrwert für den Nutzer. Die Signale aus der Optik zeichnen sich durch eine sehr hohe Langzeit Stabilität aus.
Die integrierte IMU unterliegt einer Drift, zeichnet sich jedoch durch hochdynamische Signale aus.
Eine Fusion aus dem langzeitstabilen, optischen Signal mit den Signalen der hochdynamischen IMU führt zu einem hochgenauen Sensorsystem. Zudem ergibt sich ein minimales Signalrauschen. Durch das direkte Messen der Bewegungsgrößen entfällt eine aufwändige Nachbearbeitung.
Auch die Messung von Beschleunigungen und Drehraten erfolgt direkt über eine integrierte IMU-Plattform (Inertial Measurement Unit) im Sensor. Dem Versuchsingenieur stehen nach der Montage und Ausrichtung eines einzelnen Sensors OMS 7 mehr als 40 Signale zur Verfügung. Durch all diese Signale kann der Bewegungszustand eines Fahrzeugs präzise gemessen werden und ermöglicht so die Lösung der Messaufgabe.
Um selbst in hochdynamischen Anwendungen bestehen zu können, ist die Sampling Rate des Sensors mit 1kHz ausgelegt. Damit lassen auch dynamische Spurwechselmanöver detailliert messen. Die robuste Konstruktion des Sensors und Zubehör ermöglicht den dauerhaften Betrieb selbst unter härtesten Bedingungen. So ist eine Erprobung von Polarkreis bis in der Wüste möglich. Um eine Erprobung im Straßenverkehr zu ermöglichen, verfügt der OMS 7 über eine LED-Beleuchtung im nicht sichtbaren Lichtbereich. Dadurch ist eine Störung von Verkehrsteilnehmer ausgeschlossen. Zudem besitzt der integrierte Fotoempfänger seine maximale Empfindlichkeit bei infraroten Wellenlängen.
In einem weiteren Schritt ermöglichen kalkulierte Signale die Umrechnung in horizontierte Signale der Beschleunigungen oder Drehraten. Ebenso kann der Messpunkt aller Signale auf einen beliebigen Fahrzeugpunkt umgerechnet werden. Dies spielt in der Anwendung und Auswertung des fahrdynamischen Messdaten eine wichtige Rolle, da alle Messgrößen, ausgenommen der Drehraten, ortsabhängig sind. Dem Versuchsingenieur stehen mit dem OMS 7 über 40 Signale für seine fahrdynamischen Messungen zur Verfügung
Der OMS 7 kann an jedem beliebigen Ort am Fahrzeug befestigt werden. Oftmals spiegelt der Montageort jedoch nicht den Ort der gesuchten Messgröße wider.
Die Fusion aus optischen Signalen als auch der Signale der integrierten IMU ermöglichen die Umrechnung der Messdaten für jeden beliebigen Punkt am Fahrzeug. Hierzu ist lediglich die Koordinate des Sensors am Fahrzeug in Bezug zum gesuchten Messpunkt mittels der integrierten Weboberfläche einzutragen. Der OMS 7 rechnet die Signale um und liefert diese via CAN oder Ethernet Stream an den Nutzer.
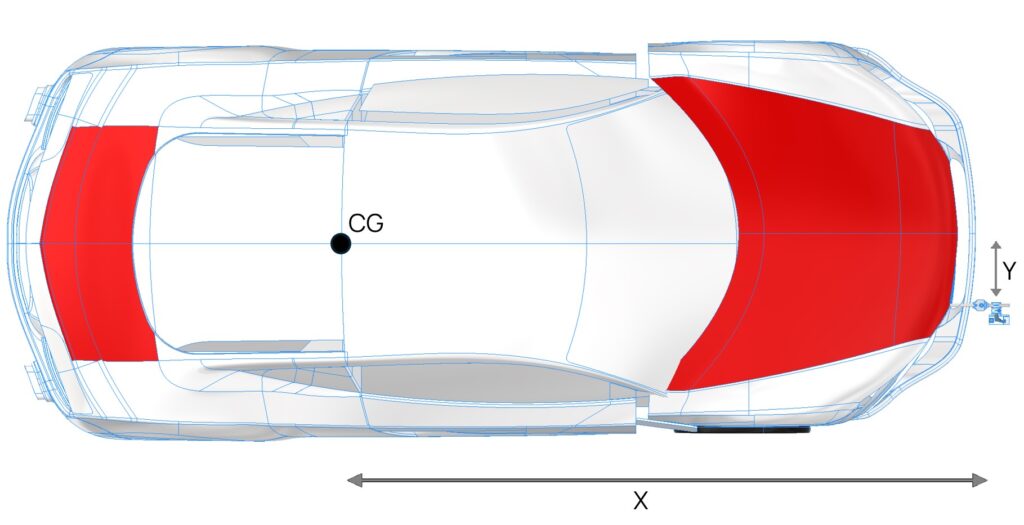
Bild: Fahrzeuganbringung und geometrische Messung POI etc.
Sein großer Arbeitsbereich vom 350mm+/-150mm erlaubt eine vielseitige und einfache Anwendung an einer großen Anzahl von Fahrzeugtypen beginnend beim PKW, LKW bis hin zum Motorrad.
Sensoric Solutions unterstützt den Anwender durch sein umfangreiches Zubehör an Halterungen.

Bild: Sensormontage am Messrad (links), an der Abschleppöse (mitte) und am Chassis (rechts)
Autoren: Kai Gilbert, Michael Dörr