
Hintergrund
Die Formula Student ist ein international anerkannter Wettbewerb, bei dem Studierendenteams von Hochschulen formelähnliche Rennwagen entwickeln und in verschiedenen Disziplinen gegeneinander antreten. Im Rahmen des Projekts von DHBW Engineering wurde ein vollelektrischer, allradgetriebener Rennwagen entwickelt, der den Anforderungen des Formula Student-Reglements entspricht. Das Hauptaugenmerk liegt dabei auf der Integration fortschrittlicher Technologien, die eine hohe Fahrdynamik sowie exzellente Fahrleistung gewährleisten.
Eine der größten Herausforderungen bei der Entwicklung eines elektrischen Allradfahrzeugs besteht in der präzisen Steuerung der Antriebskraft, die in Echtzeit auf jedes einzelne Rad verteilt werden muss. Um diese Herausforderung zu meistern, wurde ein State-Estimation-Modul entwickelt, das kontinuierlich wichtige Fahrzeugparameter wie Geschwindigkeit, Beschleunigung, Position und die auf jedes Rad wirkenden Kräfte erfasst bzw. schätzt. Diese Daten fließen in das Torque-Vectoring-System ein, welches das Drehmoment dynamisch auf die vier Räder verteilt, um die Traktion und Stabilität zu maximieren.
Durch die fortlaufende Bewertung des Fahrzeugzustands ist es möglich, jedes Rad mit der optimalen Menge an Drehmoment zu versorgen, sodass die Haftung unter allen Bedingungen gewährleistet bleibt. Abbildung 2.1 zeigt eine schematische Darstellung der wichtigsten Sensoren, die in unserem Zustandsschätzungsprozess verwendet werden.
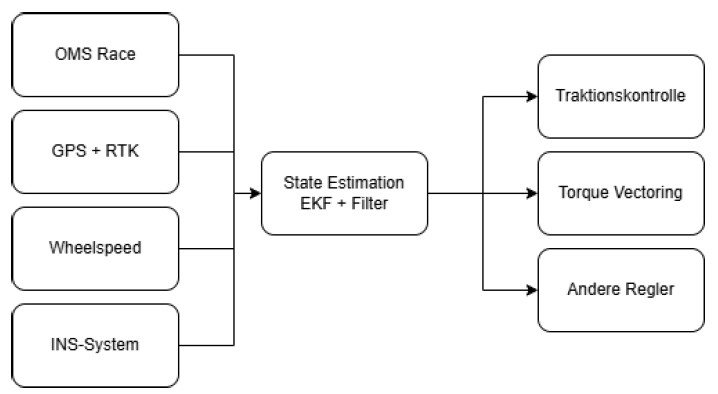
Abbildung 2.1: Sensor Topologie
Verwendung der Messdaten
Ein zentrales Element unserer Schätzmethodik ist die Geschwindigkeitsschätzung. Präzise Daten zur Fahrzeuggeschwindigkeit sind besonders wichtig für den Betrieb eines leistungsstarken Allradantriebs, um die Kurvenfahrt und Beschleunigung kontrolliert zu gestalten. Neben der Gesamtgeschwindigkeit müssen auch die Einzelgeschwindigkeiten der Räder erfasst oder geschätzt werden, um Radschlupf im Optimum zu halten und die Fahrstabilität unter anspruchsvollen Bedingungen zu gewährleisten. Die Geschwindigkeitsschätzung erfolgt mithilfe einer Sensorfusionstechnik, die Daten aus verschiedenen Quellen wie einer Trägheitsmesseinheit (IMU), einem GPS-Empfänger, Raddrehzahlsensoren und einem hochpräzisen Bodengeschwindigkeitssensor kombiniert.
Als Basis für unsere Zustandsschätzung verwenden wir den Erweiterten Kalman-Filter (EKF), der eine zuverlässige und robuste Sensorfusion ermöglicht. Die IMU fungiert hierbei als primäre Quelle, während GPS, Raddrehzahlsensoren und ein weiteres IMU-System als sekundäre Quellen zur Validierung und Absicherung der Messungen dienen. Zusätzlich haben wir den OMS Race Bodengeschwindigkeitssensor integriert, der eine hohe Messfrequenz von 1000 Hz bietet und sich durch verbesserte Rauschunterdrückung auszeichnet. Dies macht ihn zu einer idealen Ergänzung für unsere EKF-Architektur.
Die höhere Messfrequenz des OMS Race Sensors (im Vergleich zum älteren Correvit-Sensor von Kistler, der mit 250 Hz arbeitet) ermöglicht eine präzisere und dynamischere Fahrzeugverhaltenserfassung. Besonders relevant ist auch die Integration der IMU für die Messung der Geschwindigkeiten und des Schräglaufwinkels des Fahrzeugs, da diese Messung eine noch höhere Dynamik und somit bessere Einschätzung der Fahrzeugdynamik ermöglicht. Ein weiterer Vorteil dieses Sensors ist die nahtlose Integration in unsere EKF-basierte Zustandsschätzung, was eine exakte Synchronisierung mit der internen Verarbeitungsrate des Systems gewährleistet, wodurch auf Interpolation verzichtet werden kann.
Im vergangenen Jahr (Saison 2023/2024) stützten sich unsere Geschwindigkeitsschätzungen hauptsächlich auf den Correvit-Sensor von Kistler, jedoch traten Unstimmigkeiten von bis zu 5 km/h zwischen den Correvit-Daten und dem OMS Race Sensor auf. Zudem wurde ein deutlicher
Unterschied in den Rauschcharakteristiken festgestellt. Daher entschlossen wir uns, den OMS Race diese Saison als unseren Hauptsensor in der State Estimation zu verwenden. Dies trägt zur Verbesserung der Messgenauigkeit und zur Reduzierung von Fehlern bei der Geschwindigkeits- und Fahrverhaltensschätzung bei.
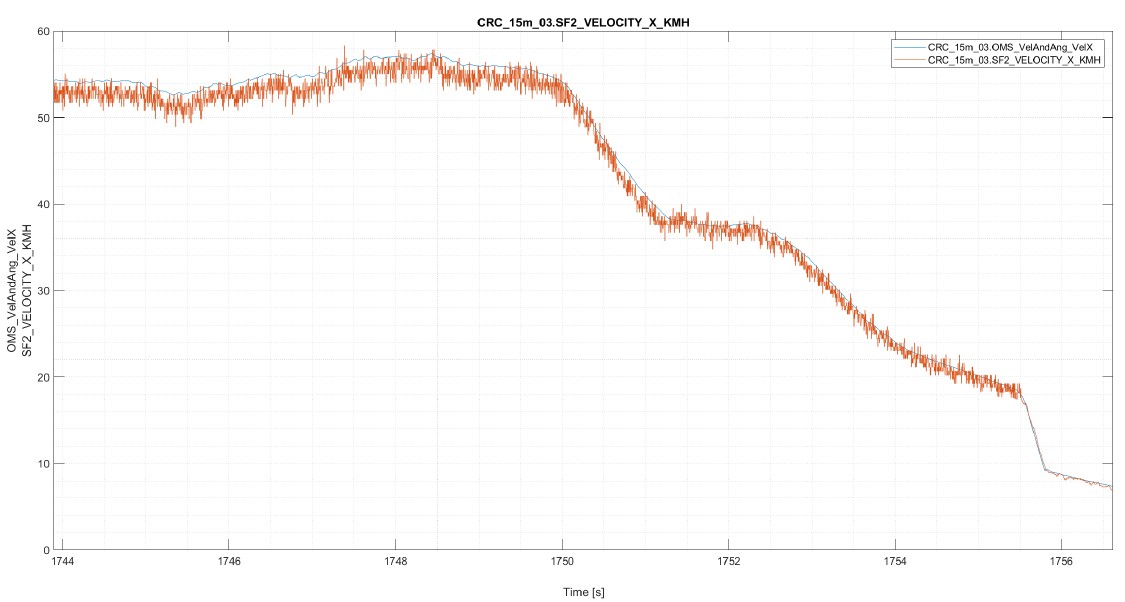
Abbildung 2.2: Vergleich OMS Race mit Kistler Correvit SF2
Installation des Sensors im Fahrzeug
Da unser Fahrzeug sehr auf Gewicht und Aerodynamik optimiert ist, stellte die Wahl eines geeigneten Montageorts für den OMS Race Sensor eine besondere Herausforderung dar. Es war entscheidend, den Sensor an einer Position zu installieren, die zuverlässige Messungen gewährleistet, dabei jedoch aerodynamische Störungen minimiert. Letztlich entschieden wir uns, den Sensor in der Nähe der Hinterachse zu platzieren, wie in Abbildung 2 dargestellt. Der Sensor ist baugleich zum Kistler Correvit-SF2, wodurch eine Plug-and-Play Installation möglich war.
Indem wir die Position des Sensors relativ zum Schwerpunkt (Center of Gravity, COG) des Fahrzeugs in unserer CAD-Umgebung präzise definierten, konnten wir sicherstellen, dass alle Positionsabweichungen in die Datenverarbeitung integriert werden. Das bedeutet, dass alle Messwerte zu Geschwindigkeit und Beschleunigung automatisch um die Abweichung des Sensors vom Fahrzeugschwerpunkt korrigiert werden, wodurch eine manuelle Nachbearbeitung entfällt. Darüber hinaus gibt es die Möglichkeit, mehrere Sensorvoreinstellungen zu speichern, was eine schnelle Anpassung an geänderte Einbaupositionen ermöglicht und das System auf andere Fahrzeuge übertragen werden kann.
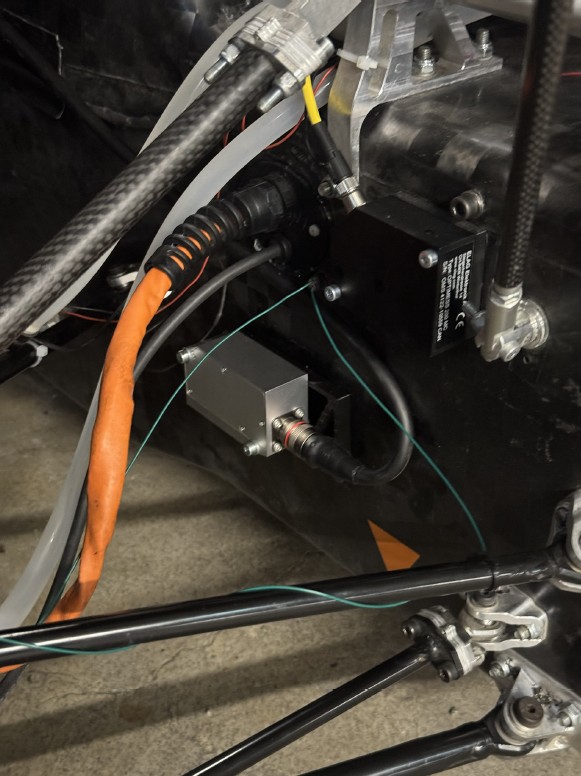
Abbildung 3.1: Einbauposition am Fahrzeug
Zusammenfassung
Durch die Integration des OMS Race Sensors und die Optimierung unserer Zustandsschätzmethoden konnten wir die Genauigkeit unserer Fahrzeugdynamikmessungen deutlich steigern. Diese Verbesserungen tragen maßgeblich zur Performance des Fahrzeugs bei, indem sie eine schnellere und präzisere Anpassung des Drehmoments an die Fahrbedingungen ermöglichen und so die Fahrstabilität und -sicherheit erhöhen. Wir können allen Formula Student Teams die ihre Traktionskontrolle validieren und verbessern wollen den Sensor wärmstens empfehlen.
Autor: Benni Stauder, Technischer Projektleiter, DHBW Engineering Stuttgart
![]()
![]()