Die Entwicklung eines Fahrzeugs beginnt mit der Identifikation eines Bedürfnisses, einer Idee oder der Erkenntnis, ein bestehendes Problem zu lösen. Ein großer Teil der Entwicklung findet heute digital statt. Entwürfe werden erstellt, zusammengeführt und in virtuellen Fahrversuchen überprüft. Erst nach erfolgreichen Simulationsläufen folgt der Fahrdynamikversuch unter realen Testbedingungen. Dabei werden Fahrzeuge weltweit unter verschiedensten Bedingungen getestet, um jede noch so kleine Schwachstelle vor der Serienproduktion zu erkennen und zu beheben. Besonders im Bereich der Fahrdynamik müssen eine Vielzahl von Messgrößen mit höchster Präzision erfasst werden. Für den Versuchsingenieur ist es essenziell, dass Messtechnik und Equipment nicht nur zuverlässig, sondern auch effizient sind, um die steigenden Anforderungen an Entwicklungszyklen und Tests zu bewältigen.
Die Anwendung bei Mercedes-Benz
Bei Mercedes-Benz steht die Entwicklung des markentypischen Fahrcharakters im Fokus. Dieser wird durch eine Vielzahl von fahrdynamischen Kennwerten definiert, die festlegen, wie sich ein Mercedes beim Fahren anfühlen soll. Um dieses Ziel zu erreichen, werden Kennwerte im Fahrversuch präzise ermittelt und mit den Soll-Vorgabe abgeglichen. Dabei ist die korrekte Erfassung des fahrdynamischen Zustands eines Fahrzeugs von essenzieller Bedeutung. Denn die Güte des Messsignals entscheidet über die Belastbarkeit der Kennwerte und damit über die Zielerreichung des Mercedes-Benz Fahrcharakters. In der Fahrzeugabstimmung ist der Schwimmwinkel des Fahrzeugs von hoher Relevanz. Dieser gibt den Winkel zwischen Fahrzeuglängsachse und dem Geschwindigkeitsvektor des Fahrzeugs an einem definierten Punkt, dem Messort, wieder. Hieraus lassen sich Reifen/Achseigenschaften und generelle Stabilitätskriterien bewerten. Mit aktiven Fahrwerkssystemen, wie beispielsweise einer Hinterachslenkung, können die gemessenen Schwimmwinkel mitunter sehr klein werden. Genau hier wird eine hohe Auflösung und Genauigkeit des Schwimmwinkels benötigt. Nur so lassen sich bei der Applikation des Fahrzeugs zielgerichtet Nuancen abstimmen, um den Mercedes-Benz Fahrcharakter zu erfüllen. Zusätzlich ist der Schwimmwinkel eine ortsabhängige physikalische Größe. Dies hat zur Folge, dass für eine fahrdynamische Analyse in bestimmte Referenzpunkte, wie zum Beispiel den Schwerpunkt des Fahrzeugs oder in die Hinterachse umgerechnet werden muss. Nur so lassen sich Fahrzeuge objektiv miteinander vergleichen. Für diese Ortsumrechnung des Schwimmwinkels ist ein stabiles Messsignal erforderlich, um keine numerischen Effekte zu erhalten, die nicht Teil der Fahrphysik sind. Für die Bildung von objektiven Kennwerten ist es generell wichtig, rauscharme und exakte Messsignale als Ausgangsgröße zu erfassen. Insbesondere bei der Schwimmwinkelmessung unterlag diese bisher großen Rauschanteilen durch die optische Messung und Wandlung mittels einer Fouriertransformation. So musste bisher mit aufwändigen statistischen Verfahren und entsprechender Messdatenlänge die Güte des Schwimmwinkelsignals stabilisiert werden. Dies resultiert bei dynamischen Fahrmanövern in einem Kompromiss aus Rauschunterdrückung und Filterdynamik.
Neuer optischer Sensor löst dieses Problem
Der neuentwickelte Sensor „OMS 7“ von Sensoric Solutions geht neue Wege in der Messung fahrdynamischer Größen. Er vereint zwei wichtige Technologien miteinander:
- Optische Ortsfilterverfahren
- Inertiale Messeinheit (IMU)
Das optische Verfahren: Vor- und Nachteile:
Das optische Verfahren des OMS 7 nutzt eine infrarote LED-Beleuchtung, die auf die Fahrbahn strahlt. Die Reflexion der strukturierten Oberfläche der Fahrbahn wird über ein Linsensystem auf einem gitterförmigen Fotodiodenarray abgebildet. Ein Umlenkspiegel erlaubt die Umlenkung des einfallenden Lichts und ermöglicht so eine kompakte Bauweise. Erfolgt eine Bewegung des Sensors oberhalb der Fahrbahn, so durchlaufen die einzelnen Strukturpunkte des Untergrundes die einzelnen Dioden-Flächen. Bei jedem Überlauf eines Strukturpunktes über die Dioden-Fläche, wird eine elektrische Spannung erzeugt. Das hieraus entstehende Signal ähnelt einem amplitudenmodulierten Sinus-Signal. Die Amplitude des Signals hängt von der Reflektion des Untergrundes ab und unterliegt starken Schwankungen. Eine Nutzung zur Bestimmung der Kenngrößen ist nicht möglich. Die Frequenz des Signals ist jedoch proportional zur gefahrenen Geschwindigkeit. Um die Quergeschwindigkeit messen zu können, wird das Fotodiodenarray mit weiteren Dioden ausgeführt. Die Dioden Flächen stehen im 90° Winkel zueinander und in 45° Grad Winkel zur Fahrtrichtung. Bei geradeausfahrt, sind die Frequenzen der beiden Fotodiodenhälften gleich groß. Bewegt sich das Auto auf einer Kreisbahn, durchlaufen die Strukturpunkte des Untergrundes die einzelnen Dioden-Flächen unter einem Winkel. Dies führt dazu, dass eine der beiden Frequenzen kleiner und die andere größer wird. Aus dem Verhältnis der beiden Frequenzen kann nun mittels trigonometrischer Formeln der Geschwindigkeitsvektor bestimmt werden. Eine Umrechnung erlaubt die Bestimmung der Längs- und Quergeschwindigkeit.
Vorteil der optischen Technologie:
- Berührungsloses, schlupffreies Messprinzip
- Messbetrieb auf nahezu allen Oberflächen
- Zuverlässige und anerkannte Technologie
Nachteile der optischen Technologie:
- Begrenzte Auflösung des Weges
Die inertiale Messeinheit: Vor- und Nachteile
IMU steht für inertiale Messeinheit (englisch: inertial measurement unit, IMU) und ist ein komplettes Inertialsystem bestehend aus einem Drei-Achsen-Gyroskop und einem Drei-Achsen-Beschleunigungsmesser. Die Drei-Achsen Ausführung erlaubt die vektorielle Bestimmung von Drehrate und Beschleunigung im Raum. Bei dem eingesetzten Typ handelt es sich um eine MEMS basierte IMU. Hierbei werden miniaturisierte mechanische und elektrische Komponenten auf einem Mikrochip kombiniert. Die Baugröße beträgt je nach verwendetem Chip nur wenige Millimeter und findet so neben der Optik im Sensor Platz.
Vorteile der IMU:
- Hochdynamisches System
- Hohe Bandbreite
- Hohe Ausgaberaten
Nachteil der IMU:
- Signale unterliegen einer Drift bzw. Offset
Die Fusion beider Technologien
In dem optischen Sensor OMS 7 werden beide Technologien miteinander vereint. Die Kombination von optischen Signalen und den Daten der IMU bietet erhebliche Vorteile:
- Langzeitstabilität der optischen Signale: Ermöglicht eine präzise Erfassung der Bewegungsgrößen ohne Drift oder Offset.
- Dynamische Signale der IMU: Mit den hochdynamischen Informationen aus der IMU werden schnelle, wechselnde Bewegungsabläufe präzise erfasst
Durch die Fusion dieser Eigenschaften entsteht ein hochgenaues Sensorsystem mit minimalem Signalrauschen. Zusätzlich entfällt eine aufwändige Nachbearbeitung der Daten, da die Bewegungsgrößen direkt gemessen werden. So werden die Fahrzeuggeschwindigkeit und der Schwimmwinkel mit einer hohen Genauigkeit von bis zu 0.1 % gemessen. Integrations- und Offset Fehler sind ausgeschlossen. Auch die Messung von Beschleunigungen und Drehraten erfolgt direkt über die integrierte IMU-Plattform. Nach der Montage und Ausrichtung eines einzigen OMS 7-Sensors stehen dem Versuchsingenieur mehr als 40 Signale zur Verfügung, die ein präzise Analyse des Bewegungszustands eines Fahrzeugs ermöglichen. Um auch in hochdynamischen Anwendungen, wie z.B. Spurwechselmanövern, bestehen zu können, arbeitet der Sensor mit einer Abtastrate von 1 kHz.
Vorteile für Mercedes-Benz
Die von Sensoric Solutions implementierte Sensor-Fusion bietet für Mercedes-Benz die Vorteile einer rauscharmen und echtzeitfähigen Messung des Schwimmwinkels. Besonders die Kenntnis über einen Fehleranteil des Schwimmwinkelsignals durch die Aufbaubewegung des Fahrzeugs wird Rechnung getragen, indem eine Korrekturfunktion die Wankbewegung erfasst und entsprechend korrigiert. Dies ist besonders wichtig, da es im Fahrversuch gilt den Schwimmwinkel des Starrkörper Fahrzeugs in einer ebenen Bewegung zu analysieren.
Weitere Eigenschaften des optischen Sensors
Flexibilität in der Signalverarbeitung
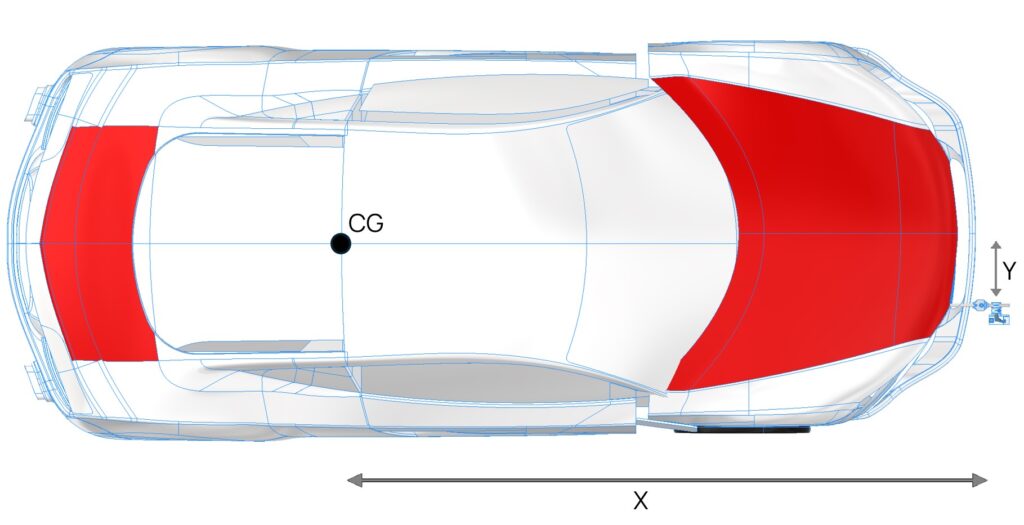
Abbildung 1: Fahrzeuganbringung und geometrische Messung POI
Dank der integrierten Echtzeitverrechnung können die gemessenen Beschleunigungen und Drehraten nicht nur relativ zum Untergrund erfasst werden. Zusätzlich ermöglichen kalkulierte Signale die Umrechnung in horizontierte Signale. Auch der Messpunkt aller Signale kann flexibel auf jeden beliebigen Fahrzeugpunkt übertragen werden, indem die Position des Sensors relativ zu diesem Punkt angegeben wird. Hierzu genügt es die Koordinate des Sensors über die integrierte Weboberfläche einzugeben.
Dies ist besonders relevant, da der Montageort des Sensors häufig nicht mit dem Ort der gesuchten Messgröße übereinstimmt. Da alle Messgrößen – mit Ausnahme der Drehraten – ortsabhängig sind, spielt die korrekte Umrechnung eine entscheidende Rolle für die Auswertung fahrdynamischer Messdaten. Der OMS 7 stellt dem Versuchsingenieur über 40 Signale flexibel und komfortabel zur Verfügung – wahlweise über CAN- oder Ethernet-Stream. Dies bietet maximale Freiheit bei der fahrdynamischen Analyse.
Flexibilität in der Montage
Der OMS 7 lässt sich problemlos an nahezu jeder Stelle des Fahrzeugs montieren. Ein breites Angebot an Halterungen – darunter Varianten mit Saugnäpfen, Magneten sowie spezifische Befestigungen für die Abschleppöse oder das Rad – ermöglicht eine flexible und einfache Installation. Dank seines großen Arbeitsbereichs von 350 mm ± 150 mm ist der OMS 7 vielseitig einsetzbar und eignet sich für eine breite Palette von Fahrzeugtypen, von PKWs über LKWs bis hin zu Motorrädern.

Abbildung 2: Der OMS 7-Sensor montiert an der Abschleppöse eines Mercedes
Intuitive Konfiguration
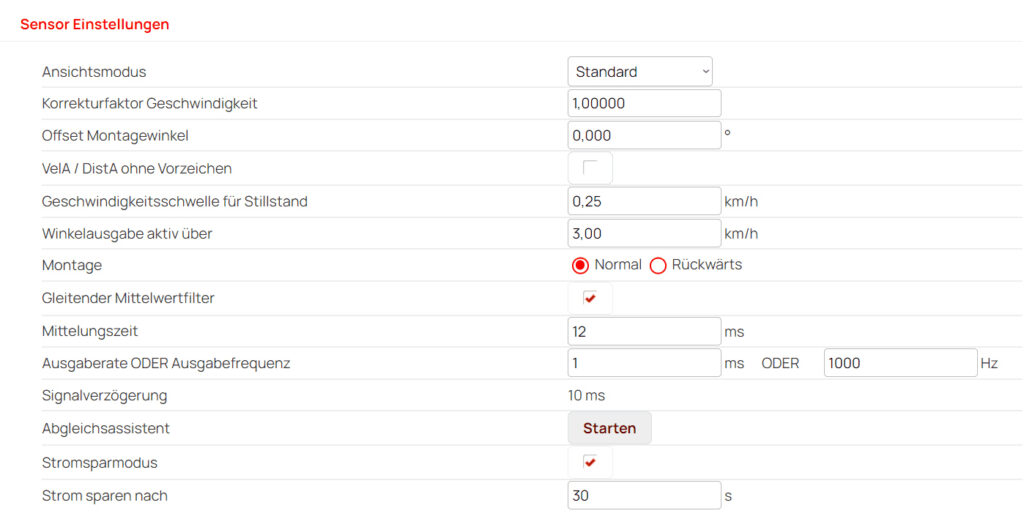
Abbildung 3: Webinterface zur Konfiguration des Sensors
Die Konfiguration des OMS7 erfolgt über eine Ethernet-Schnittstelle an der ECU des Sensors. Über ein Webinterface lassen sich komfortable alle Einstellungen und Berechnungen vornehmen, ohne dass eine zusätzliche Software installiert werden muss. Neben der Konfiguration der Sensorparameter findet in der ECU auch die gesamte Signalfilterung, Aufbereitung und Umrechnung statt. Eine Besonderheit ist die Möglichkeit sowohl die Rohsignalen der Optik als auch die fusionierten Messsignalen ausgeben zu können.
Fazit
Mit dem OMS 7 ergibt sich für Mercedes-Benz die Möglichkeit, die objektiven Kennwerte in einer höheren Genauigkeit und Wiederholbarkeit zu messen und auszuwerten. Darüber hinaus ergeben sich weitere Möglichkeiten in der Analyse des Fahrverhaltens, die bisher nicht möglich waren. So werden kleinste Fahrzeugbewegungen messbar und lassen sich im Detail analysieren.
Autoren: Kai Gilbert, Michael, Dörr, Matthias Meurer, Andreas Staiger, Philipp Röding